19,87 lei
In stoc
PCB Design


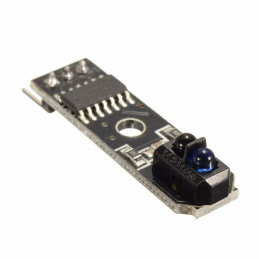
Modul senzor TCRT5000, 5 senzori IR, 5V, pentru roboți urmărire linie și detecție obstacole.
 Livram și în lockere
Livram și în lockere
Ridică-ți comenzile când vrei tu!
 Livrare rapidă: o zi lucrătoare!
Livrare rapidă: o zi lucrătoare!
Comandă până la ora 14:00 și expediem astăzi coletul
 Garantie 2 ani
Garantie 2 ani
Produse sigure, fără griji!
 Retur simplu în 14 zile
Retur simplu în 14 zile
Produse nefolosite? Retur fără întrebări!
Modulul BFD-1000 cu 5 senzori TCRT5000 este o soluție practică pentru roboți line follower, roboți educaționali Arduino, platforme mobile și proiecte care necesită detectarea unei linii, identificarea obstacolelor din față și detecție de contact.
Partea principală a modulului este formată din 5 senzori reflexivi infraroșu, utilizați pentru urmărirea unei linii pe baza diferenței de reflexie dintre traseu și fundal. Cele 5 canale oferă mai multă informație despre poziția liniei decât un senzor simplu, fiind utile pentru corecții mai line ale direcției robotului.
Important: pentru funcționare corectă la urmărirea liniei, senzorii trebuie montați foarte aproape de suprafață. Distanța recomandată este de maximum 5 mm, ideal mai mică, aproximativ 1…3 mm. Dacă modulul este montat prea sus, diferența de reflexie poate deveni prea mică, iar citirile pot fi instabile sau greșite.
Linia urmărită trebuie realizată dintr-un material diferit față de suprafața de bază, nu doar desenată cu markerul. Pentru rezultate bune se recomandă bandă izolatoare neagră aplicată pe o suprafață albă, hârtie neagră lipită pe carton alb sau alte materiale cu reflexie clar diferită. O linie trasată doar cu markerul poate părea vizibilă pentru ochiul uman, dar poate să nu ofere contrast suficient în infraroșu pentru senzor.
Modulul include și detecție de obstacole în față. În zona frontală sunt două componente optice: un LED infraroșu emițător și un receptor infraroșu, de obicei într-o capsulă închisă la culoare. LED-ul IR emite lumină infraroșie spre față, iar receptorul detectează lumina reflectată de un obiect. Când reflexia depășește pragul setat, ieșirea Near își schimbă starea logică.
Senzorul frontal de obstacole nu măsoară distanța exactă în centimetri, ci indică digital dacă un obiect este suficient de aproape. Sensibilitatea se ajustează cu potențiometrul de pe placă, iar raza de detecție depinde de materialul, culoarea, forma și unghiul obstacolului. Suprafețele deschise și lucioase reflectă mai bine, iar cele negre, mate sau transparente pot fi detectate mai greu.
Pe modul există și un întrerupător frontal de tip touch/bump switch. Acesta este util ca senzor de contact: dacă robotul atinge fizic un obstacol, întrerupătorul schimbă starea pinului CLP. Astfel, proiectul poate combina detecția fără contact prin Near cu confirmarea contactului fizic prin CLP.
1. Se conecteaza modulul TCRT5000 la arduino astfel:
2. Se adauga libraria de AICI
3. Din Arduino IDE accesam "Examples" din meniul "File" , "QTRSensors" si "QTRRCExample"
4. Inlocuim numarul senzorilor de pe linia
#define NUM_SENSORS 8 cu 5 si modificam in linia
QTRSensorsRC qtrrc((unsigned char[]) {3, 4, 5, 6, 7, 8, 9, 10} cu pinii digitali pe care i-am mentionat mai sus si anume 2,3,4,5,6. (7,8 sunt folositi pentru detectarea obstacolelor nu pentru urmarirea liniei).
5. Incarcam codul si miscam aprox. 10 secunde modulul stanga-dreapta deasupra liniei pentru calibrare păstrând modulul la o înălțîme constantă.
6. Verificam in Serial Monitor valorile afisate.
1x Modul senzor urmarire linie TCRT5000
Aprecierea ta pentru recenzie nu a putut fi trimisa
Reclama un comentariu
Raport trimis
Reclamatia tau nu a putut fi trimisa
Scrie-ti recenzia
Recenzia a fost trimisa
Recenzia ta nu a putut fi trimisa
Referinta: YQZBML_Mod-light
Referinta: BUTCEA_AC_5A
Referinta: HEFYBX_LM3915N-1
Referinta: RNQMCD_GS
Producător: GroundStudio
Referinta: BOQWRO_HX711
Referinta: EJCGSM_TTP223B
Referinta: AMVFIL_LINE_FLWR
check_circle
check_circle