
Niciun produs
Prețurile includ TVA
Robot ocolitor de obstacole - kit complet - ARCO







RUUZCT_KIT-Spark
Produs nou
Acest produs nu mai este in stoc
Descriere
Garantie:
Kiturile sunt garantate pe componente, acestea trebuie măsurate și testate individual înainte de momentul asamblării.
Deoarece asamblarea se face de către personal neautorizat, în condiții necunoscute sau în stadii necunoscute de finalizare, nu ne putem asuma nicio răspundere legală legată de funcționarea dispozitivelor asamblate de către orice terță parte.
Legarea componentelor
Pentru asamblarea acestui kit sunt necesare cunostinte de electronica de baza!
De asemenea, unele componente au nevoie de lipire. Uneltele necesare (letcon si fludor) nu sunt incluse in kit.
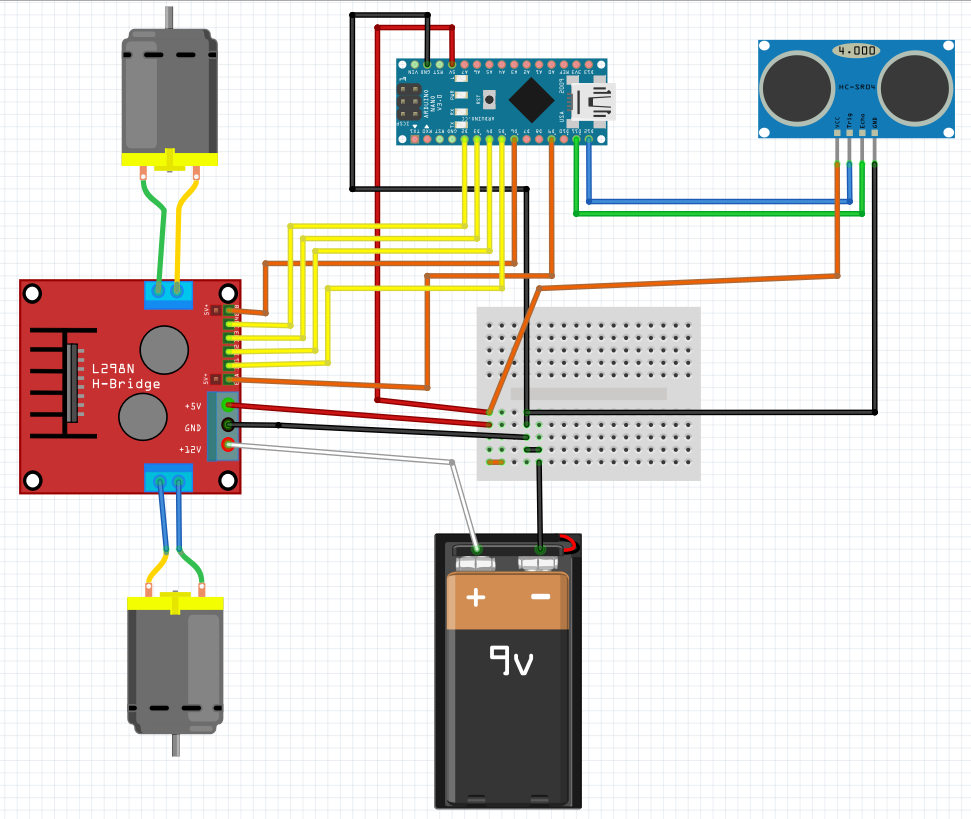
Stabilizatorul alimentează atât partea logică din puntea H cât și placa Nano.
Exemplu de conectare Arduino IDE:
Pasul 1 - Descarcati Arduino IDE
Inainte de a conecta placa incepeti prin a descarca Arduino IDE 1.8.x de la adresa de mai sus in functie de preferintele dvs. si de sistemul de operare utilizat.
Pasul 2 - Conectati placa de dezvoltare la computer
Dupa conectarea initiala prin cablu usb-c, computerul va incera sa caute un driver compatibil. In cazul acesta se va conecta direct la windows cu ajutorul chipului HT42B534-2 deoarece driverele pentru acesta se vor instala automat.
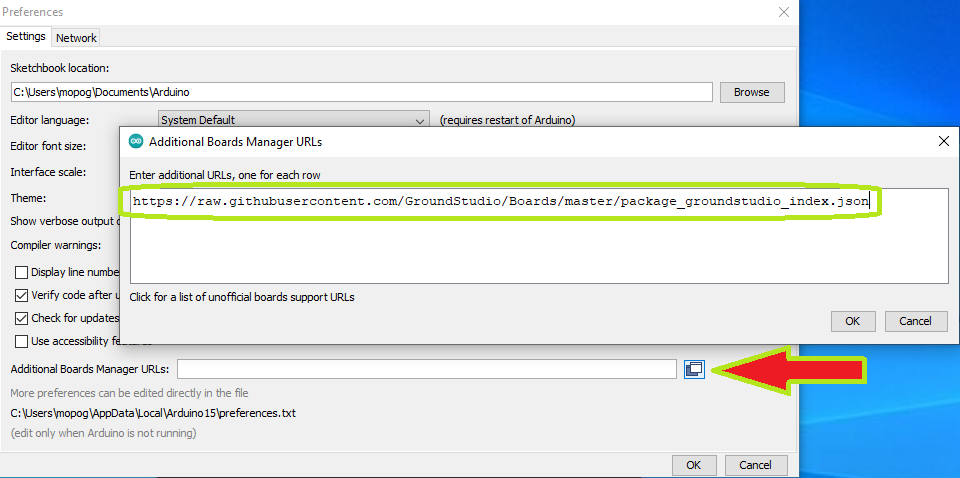
Pasul 3 - Realizarea setarilor necesare in Arduino IDE.
In "File->Preferences->Aditional Boards Manager URLs:" adaugati linkul urmator: "https://raw.githubusercontent.com/GroundStudio/Boards/master/package_groundstudio_index.json".
Accesati "Tools->Board->Boards Manager".
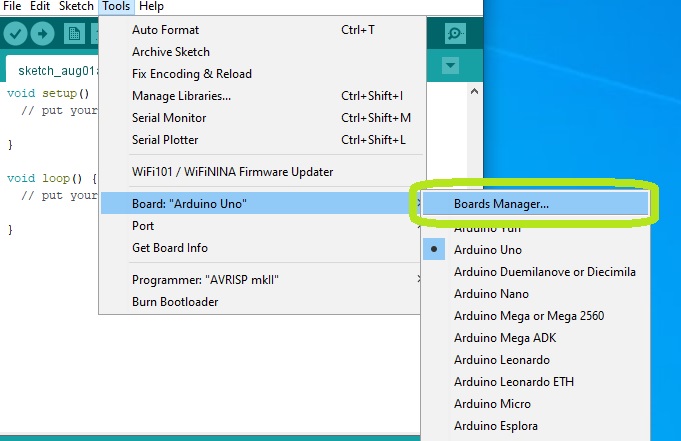
Cautati setul de board-uri "GroundStudio Jade Boards" si instalati ultima versiune disponibila.
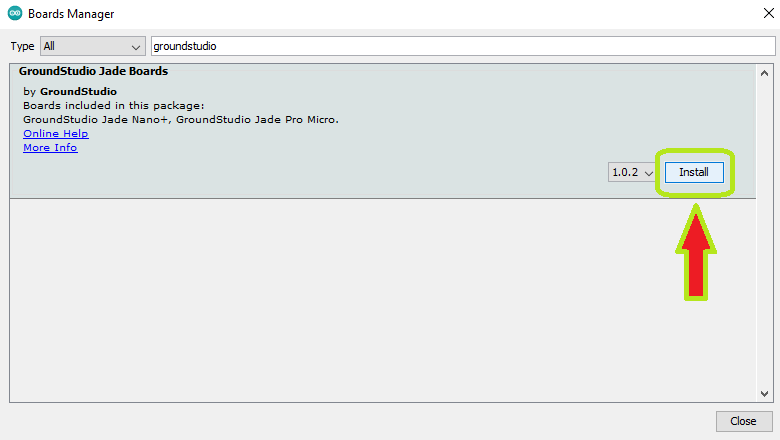
Dupa instalare, veti avea disponibil in meniul "Tools" board-ul "GroundStudio Jade Nano+"
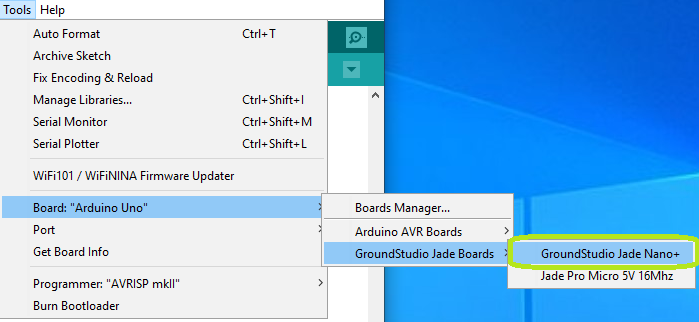
In continuare , trebuie sa ii spunem IDE-ului Arduino la care dintre porturile seriale ale computerului nostru este conectat la Jade Nano+. Pentru aceasta, mergeti din nou la "Tools", apoi selectati portul COM al Jade Nano+.
Daca aveti mai multe porturi si nu sunteti sigur care dintre porturi este Jade Nano+, deconectati-l pentru o clipa si verificati in "Device Manager" meniul "Ports" pentru a vedea care dintre acestea dispare.
Pasul 4 - Instalarea librariei NewPing
Pasul 5 - Incarcarea codului
Dupa selectarea COM-ului si a Board-ului puteti incarca (Upload) codul "spark.ino" disponibil in sectiunea DESCARCARI.
DEMO: Click here
- NewPing1.8
NewPing1.8 - Spark - fritzing
Spark - fritzing - Spark2
Spark2
Nu sunt review-uri în acest moment.
30 alte produse în aceeași categorie:
-
Modul BMS protectie...
15,33 lei
-
Modul incarcare si...
10,44 lei
-

Modul incarcare si...
19,60 lei
-

Modul protectie si...
16,07 lei
-
Modul incarcare,...
16,92 lei
-
Modul conversie analog...
57,83 lei
-

Modul senzor capacitiv...
14,46 lei
-

Controler PWM HHO RC...
60,29 lei
-

Freza pentru aluminiu...
35,23 lei
-

Modul display 1.8inch...
55,33 lei 83,00 lei
-

Modul incarcare si...
49,16 lei
-

Freza pentru usi si...
107,10 lei
-

Node MCU V3 - LoLin...
31,92 lei 42,63 lei
-

Set 2 cleme test...
3,00 lei 4,50 lei
-
Indicator cu cu 4...
20,24 lei
-

Header 40 pini pentru...
0,96 lei
-

Siguranta resetabila...
7,52 lei
-

Siguranta resetabila...
8,35 lei
-

Siguranta resetabila...
8,68 lei
-

Siguranta resetabila...
10,25 lei
-

Tranzistor NPN bipolar...
0,43 lei 0,64 lei
-

Tranzistor PNP bipolar...
1,61 lei
-

Arduino Student Kit
390,92 lei 428,40 lei
-

65 x fire jumper
11,86 lei 14,61 lei
-

Breadboard 830 puncte...
10,14 lei 20,85 lei
-

Kit RFID 13.56 MHz
16,07 lei
-

Modul PIR - senzor de...
4,42 lei 8,47 lei
-

Modul incarcare...
2,57 lei 3,86 lei
-
Modul MCU mini...
3,21 lei 4,82 lei
-
Placa dezvoltare ATTINY85
44,66 lei 66,99 lei


