
Niciun produs
Prețurile includ TVA


Kit-ul include placa de dezvoltare GroundStudio Jade Nano+
Produsele create de GroundStudio sunt realizate folosind componente de calitate superioara, acestea sunt proiectate si asamblate in Romania.
 |  |
Descrierea produsului:
GARANTIE:
Kiturile sunt garantate pe componente, acestea trebuie măsurate și testate individual înainte de momentul asamblării.
Deoarece asamblarea se face de către personal neautorizat, în condiții necunoscute sau în stadii necunoscute de finalizare, nu ne putem asuma nicio răspundere legală legată de funcționarea dispozitivelor asamblate de către orice terță parte.
Link tutorial video asamblare: link
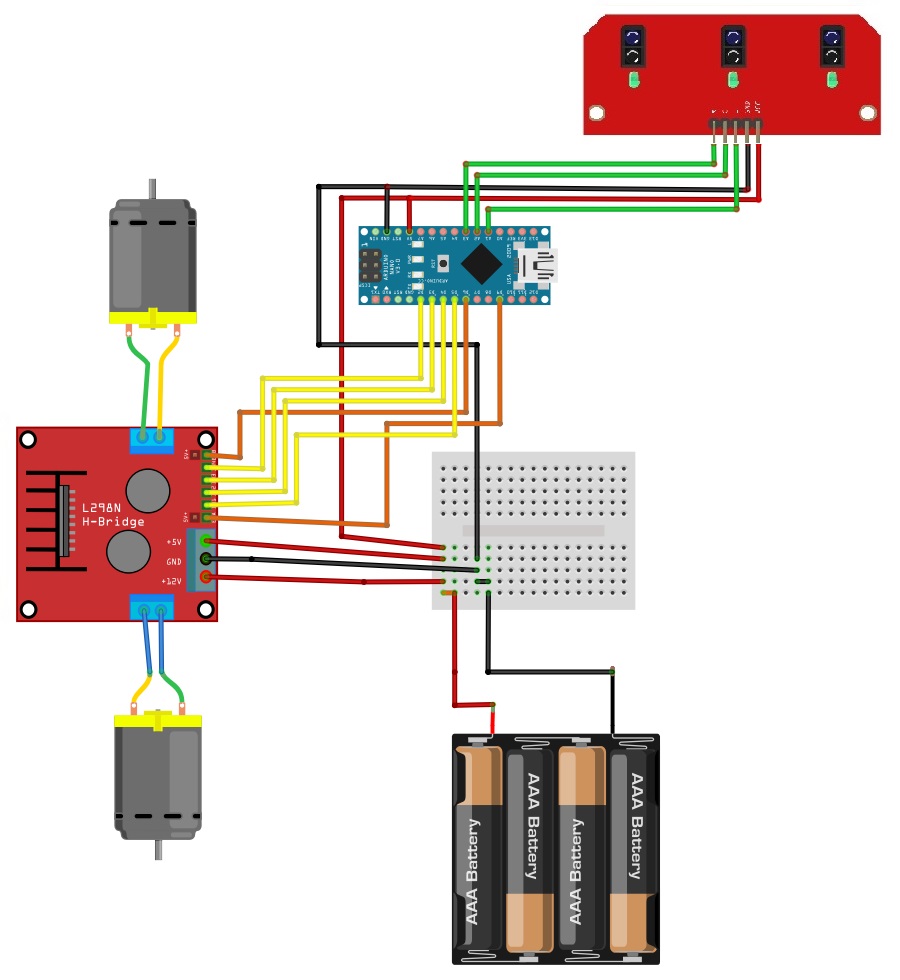
LEGAREA COMPONENTELOR
Pentru asamblarea acestui kit sunt necesare cunostinte de electronica de baza!
De asemenea, unele componente au nevoie de lipire. Uneltele necesare (letcon si fludor) nu sunt incluse in kit.
Important!!
- Unele module L298N vin cu jumperi care leaga pinii ENA si ENB la 5V. Acestia trebuie inlaturati!
- Inainte (jumperii trebuie scosi):
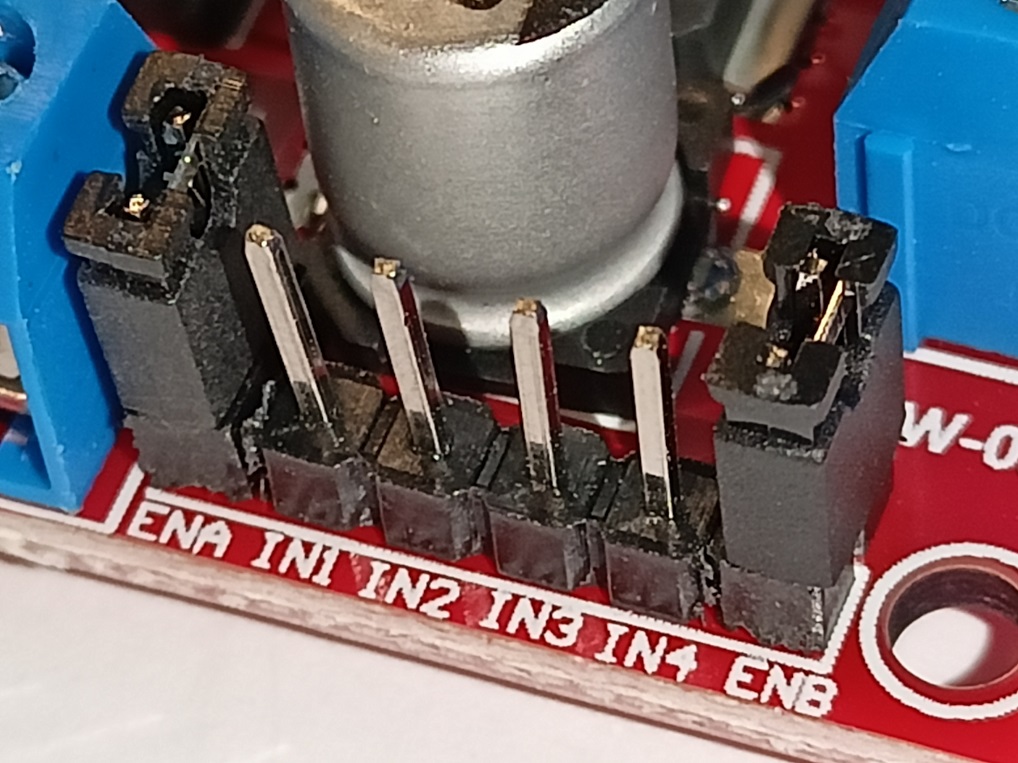
- Dupa (jumperii au fost scosi):
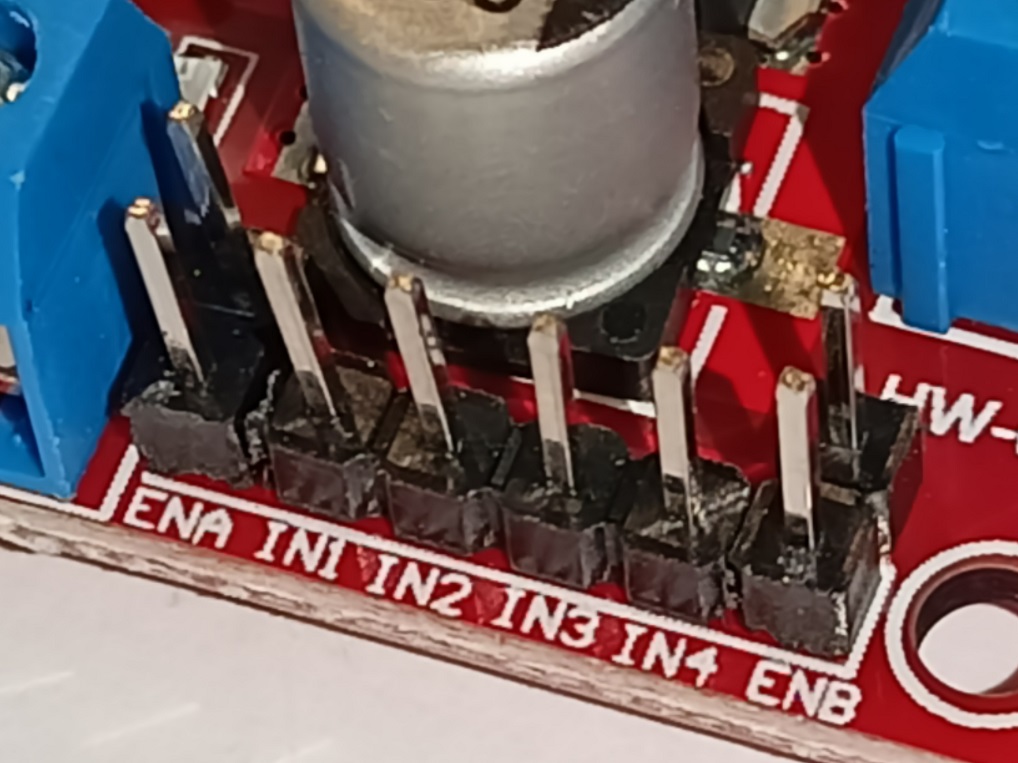
- Inainte (jumperii trebuie scosi):
- Jumperul din spatele conectorului pentru alimentare (+12V, GND, +5V) trebuie deconectat pentru ca alimentarea principala este sub 6V.
- Inainte (jumperul trebuie scos):

- Dupa (jumperul a fost scos):
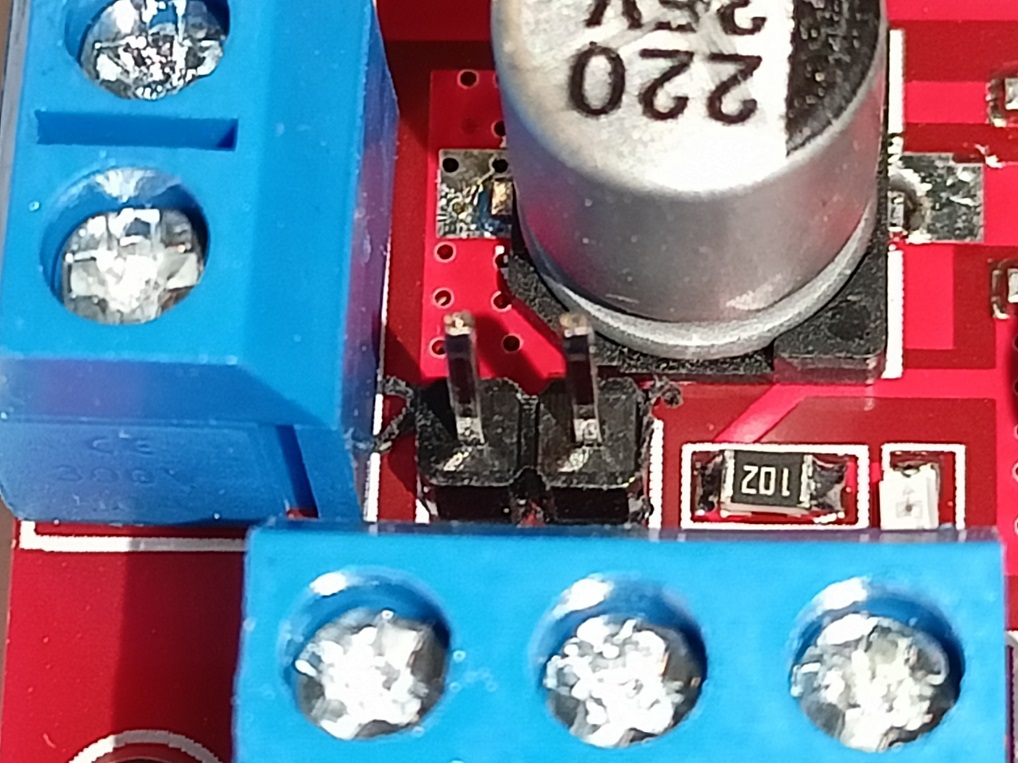
- Inainte (jumperul trebuie scos):
- Cele 4 baterii au maximum 6V doar la incarcarea maxima si daca nu sunt acumulatori.Un set de acumulatori are aproximativ 5V, de aceea este legat direct la intrarea microcontrollerului (5V in loc de Vin).
- Jumperul activeaza stabilizatorul de voltaj care functioneaza doar pentru surse de alimentare peste 6V.
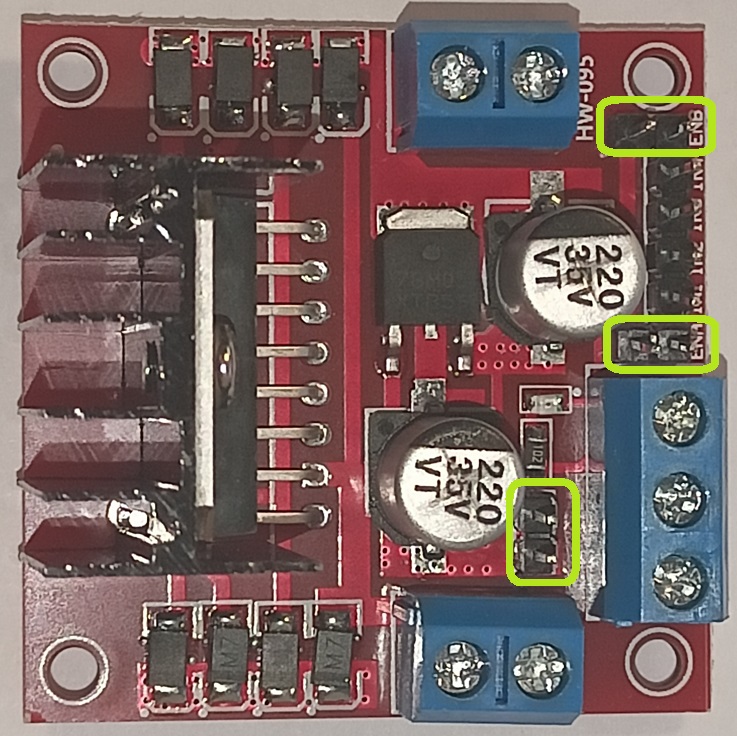
- In concluzie TOTI CEI 3 JUMPERI din pozitiile indicate in poza de mai jos TREBUIE SCOSI DE PE MODUL inainte de realizarea conexiunilor electrice.
Conexiuni electrice:
Programarea placii de dezvoltare
Placile Jade Nano+ folosesc chipul HT42B534-2, acesta nu necesita instalarea unui driver aditional pe niciun sistem de operare (spre deosebire de alte chip-uri de pe piata (CH340, FTDI, etc)).
Pasul 1 - Descarcati Arduino IDE
Inainte de a conecta placa incepeti prin a descarca Arduino IDE 1.8.x de la adresa de mai sus in functie de preferintele dvs. si de sistemul de operare utilizat.
Pasul 2 - Conectati placa de dezvoltare la computer
Dupa conectarea initiala prin cablu usb-c, computerul va incera sa caute un driver compatibil. In cazul acesta se va conecta direct la windows cu ajutorul chipului HT42B534-2 deoarece driverele pentru acesta se vor instala automat.
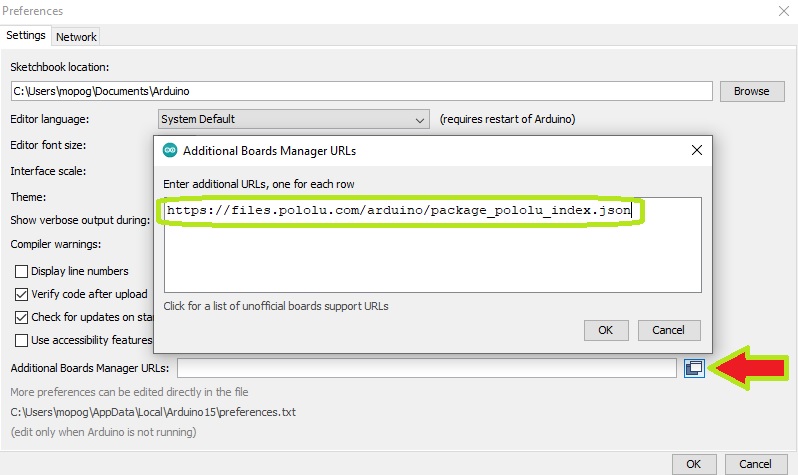
Pasul 3 - Realizarea setarilor necesare in Arduino IDE.
In "File->Preferences->Aditional Boards Manager URLs:" adaugati linkul urmator: "https://files.pololu.com/arduino/package_pololu_index.json".
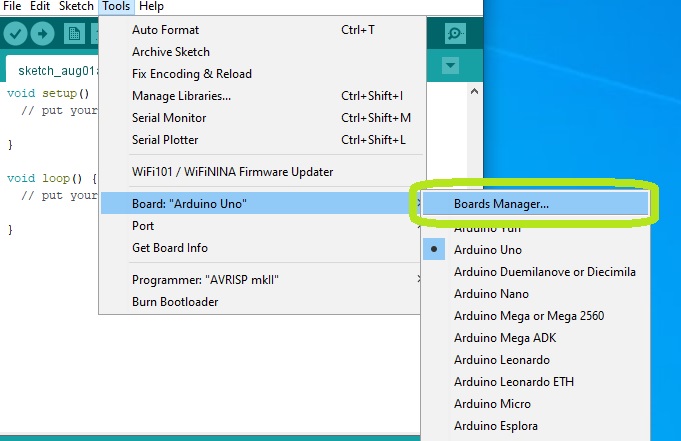
Accesati "Tools->Board->Boards Manager".
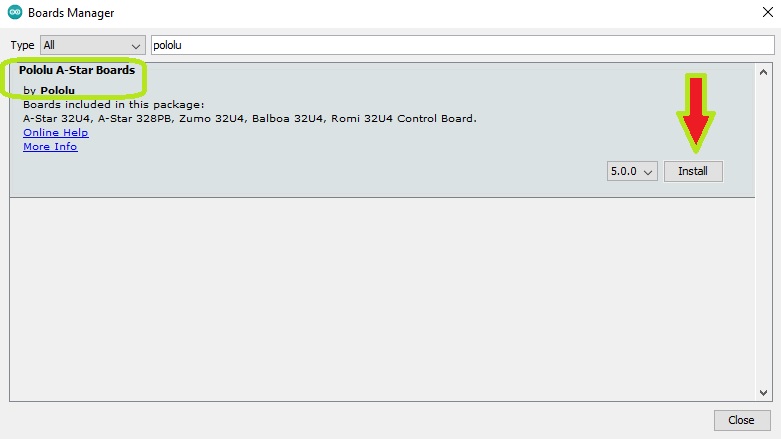
Cautati setul de board-uri "Pololu A-Star Boards by Pololu" si instalati ultima versiune disponibila.
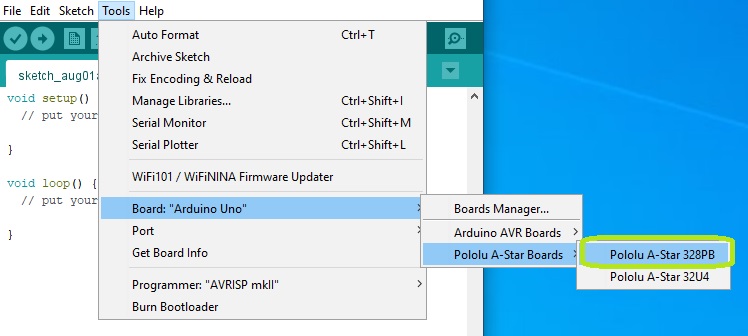
Dupa instalare, veti avea disponibil in meniul "Tools" board-ul "Pololu A-star 328PB".
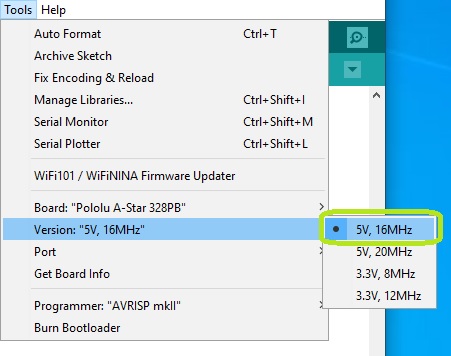
Dupa selectarea boardului, in meniul Tools va aparea o sectiune noua "Version". Aici va trebui selectata optiunea "5V, 16MHz".
In continuare , trebuie sa ii spunem IDE-ului Arduino la care dintre porturile seriale ale computerului nostru este conectat la Jade Nano+. Pentru aceasta, mergeti din nou la "Tools", apoi selectati portul COM al Jade Nano+.
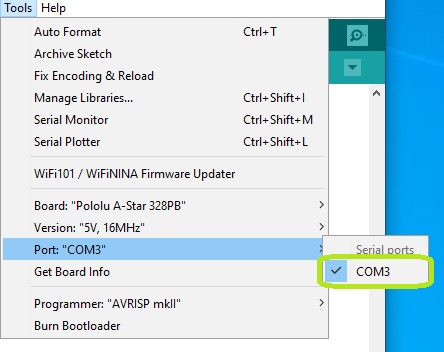
Daca aveti mai multe porturi si nu sunteti sigur care dintre porturi este Jade Nano+, deconectati-l pentru o clipa si verificati in "Device Manager" meniul "Ports" pentru a vedea care dintre acestea dispare.
Pasul 3 - Incarcare firmware .ino
Inainte de a fi compilat trebuie instalata librariile "QTRSensors" si "L298N" (folosite pentru senzorul de infrarosu si driverul de motor).
Versiunile 3.1.0 pentru "QTRSensors" si 1.1.0 pentru "L298N" le puteti descarca tot de mai jos, din sectiunea "Descarcari".
Se instaleaza din interfata Arduino, din meniul Sketch -> Include Library -> Add .Zip Library.
Acolo selectati fisierul .zip pe care tocmai l-ati descarcat si libraria va fi instalata.
Dupa instalare, descarcati firmware-ul din sectiunea "Descarcari" si deschideti fisierul LineFollower.ino in Arduino IDE.
ATENTIE: exemplul din sectiunea descarcari foloseste versiunea 3.1.0 a librariei, acesta nu va compila daca este folosita o versiune diferita a acestei librarii.
Pentru incarcare faceti click pe sageata in dreapta din coltul stanga - sus (Upload).
In functie de bateriile folosite este necesara schimbarea vitezei de deplasare. Aceasta este variabila "viteza" declarata la inceput in cod. Tinand cont ca este semnal de tip PWM, valorile sunt intre 0 - 255.
Nu sunt review-uri în acest moment.
Continutul pachetului
 11,86 lei 14,61 lei -2,75 lei In stoc cu TVA
11,86 lei 14,61 lei -2,75 lei In stoc cu TVA 10,71 lei In stoc cu TVA
10,71 lei In stoc cu TVA 4,82 lei Stoc epuizat cu TVA
4,82 lei Stoc epuizat cu TVA 4,39 lei In stoc cu TVA
4,39 lei In stoc cu TVA1 x L298N Punte H dubla (dual H-bridge) motor...
1Modul punte H dublu
11,49 lei 16,44 lei -4,95 lei cu TVAIn stoc 3,12 lei Produs disponibil cu alte optiuni cu TVA
3,12 lei Produs disponibil cu alte optiuni cu TVA1 x Suport pentru senzor ultrasonic HC-SR04 -...
Suport printat 3d pentru senzorul ultrasonic HC-SR04.
3,12 lei cu TVAProdus disponibil cu alte optiuni 4,28 lei In stoc cu TVA
4,28 lei In stoc cu TVA 20,24 lei 30,36 lei -10,12 lei In stoc cu TVA
20,24 lei 30,36 lei -10,12 lei In stoc cu TVA 0,54 lei In stoc cu TVA
0,54 lei In stoc cu TVA 2,68 lei In stoc cu TVA
2,68 lei In stoc cu TVA 0,54 lei In stoc cu TVA
0,54 lei In stoc cu TVA - negru - 21mm") 4,02 lei In stoc cu TVA
4,02 lei In stoc cu TVA 5,78 lei In stoc cu TVA
5,78 lei In stoc cu TVA 21,21 lei 31,81 lei -10,60 lei Stoc epuizat cu TVA
21,21 lei 31,81 lei -10,60 lei Stoc epuizat cu TVA






30 alte produse în aceeași categorie:
-
Roata roboti + cauciuc...
10,71 lei
-
Motor DC 3V-6V cu...
4,82 lei
-
Suport carcasa baterii...
4,39 lei
-

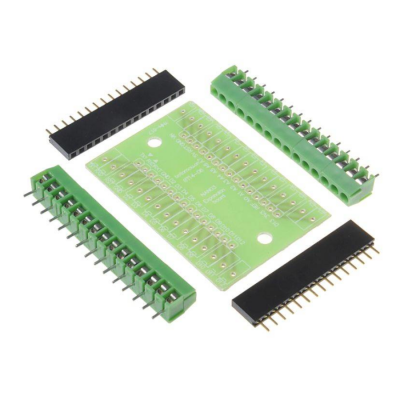
Sensor Shield Arduino...
12,55 lei 20,79 lei
-

Voltmetru digital DC 4...
10,41 lei 15,62 lei
-

Mufa baterie 9v - forma T
2,25 lei
-

Bareta 40 x pini tata...
0,75 lei
-

Placa de dezvoltare...
46,80 lei
-

Carcasa Arduino MEGA...
30,94 lei
-

Kit RFID 13.56 MHz
16,07 lei
-

LED 3mm
0,53 lei
-

Tastatura matriciala 4x4
4,34 lei
-

KIT IR telecomanda +...
10,12 lei
-

Slider switch - 2 pozitii
0,49 lei
-
Nano Board Terminal...
10,07 lei
-
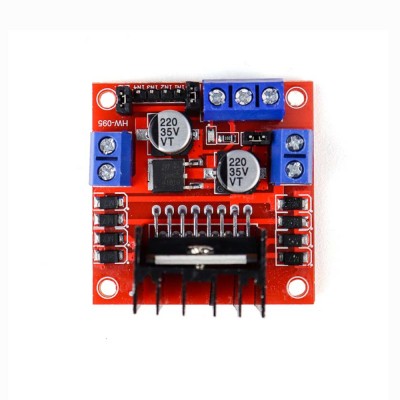
L298N Punte H dubla...
11,49 lei 16,44 lei
-
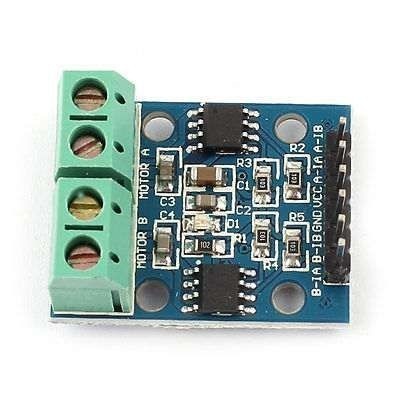
Punte H (H-Bridge)...
3,24 lei 10,95 lei
-

Cablu USB A-B 1m...
8,10 lei
-

Motor pas cu pas...
40,06 lei 60,08 lei
-

Node MCU V3 - LoLin...
31,92 lei 42,63 lei
-

Driver motor pas cu...
8,25 lei 12,37 lei
-
Modul Tiny RTC I2C...
4,50 lei 6,75 lei
-

Bareta 40 x pini mama...
1,93 lei
-

Bareta 40 x pini mama...
4,28 lei
-

Bareta 40 x pini tata...
1,93 lei
-
Modul I2C pentru LCD...
3,68 lei 14,33 lei
-

Buton MIC - Push...
0,63 lei 1,03 lei
-

Matrice LED-uri 8x8 +...
14,87 lei 21,56 lei
-

Servomotor MG995
28,92 lei
-

Servomotor SG90
11,57 lei


